
剛泡好咖啡。對著電腦,路上無車無人,夜深無聲。沉默太久,傷害也太重,我想該是和大家清楚說幾句話的時候。前些日子,收到吳姓網友的訊息,說有一些問題想要討論一下,就此展開了一個奇幻旅程。
近期因為 VR 的產品像是雨後春筍般的冒出來,相關的應用也慢慢的在發展當中,例如 Youtube 加上 Google Cardboard 的應用,諸如此類的東西,貌似變成了一種潮流。
Image source: http://heckifiknowcomics.com/post/134582065049
其實在 stackoverflow 就有類似解答,
http://stackoverflow.com/questions/29716215/using-device-orientation-with-3d-transforms
收工啦(欸
matrix3d
吳姓網友的問題,是想在瀏覽器中,製作一個可以依照行動裝置陀螺儀資訊,相對旋轉的物體。根據 w3c 所說,陀螺儀所傳出來的資訊,我們可以透過 DeviceMotionEvent 來拿到,會有三個數字,依照 html5rocks 的說明,三個數值分別是:
- gamma,對於 Y 軸旋轉的角度變化
- beta,對於 Z 軸旋轉的角度變化
- alpha,對於 X 軸旋轉的角度變化
所以,我們就很開心的想說,利用 matrix3d 來去旋轉一個 3D 立方體,用來達到手機旋轉,立方體跟隨的一個動作。
但是!事情不是憨人想的那麼簡單!
我們馬上遇到 matrix3d 在旋轉上面的一些 特性,具體的結果實在沒有辦法用文字描述,這裡有一個網站,有興趣的人,可以依照我說的步驟試試看,
- 開啟 3D MODE
- X 的 ROTATE 輸入
170 - X 的 ROTATE 輸入
180 - X 的 ROTATE 輸入
190 - X 的 ROTATE 輸入
0 - Y 的 ROTATE 輸入
170 - Y 的 ROTATE 輸入
180 - Y 的 ROTATE 輸入
0 - Z 的 ROTATE 輸入
170 - Z 的 ROTATE 輸入
180
你會發現,上面那張圖片貌似先翻了 180 度之後,再轉去你要的 190 這個角度(對 X 軸來說)。這是我們遇到的第一個問題,也是唯一的問題,接近任何一個軸旋轉的極限值之後,會發生翻轉。這種翻轉事件在 3D 正方體的視角中,你會完全看不到背面。
意思就是,當 X 軸翻轉到極限值 180,他只會將正方體翻面,然後用翻面後的向量轉成 190 給你看。至於什麼是翻面後的向量,具體可以參考這裡對於旋轉的矩陣方程式:
之後我不死心去翻了 w3c 關於這方面的解釋,其中寫到,
http://www.w3.org/TR/css-transforms-1/#mathematical-description
A 3D rotation with the vector $[x, y, z]$ and the parameter $\alpha$ is equivalent to the matrix:
$$
\begin{pmatrix}
1 - 2 * (y^2+z^2) * sq & 2 * (x * y * sq - z * sc) & 2 * (x * z * sq + y * sc) & 0\\
2 * (x * y * sq + z * sc) & 1 - 2 * (x^2+z^2) * sq & 2 * (y * z * sq + x * sc) & 0\\
2 * (x * z * sq - y * sc) & 2 * (y * z * sq + x * sc) & 1 - 2 * (x^2+y^2) * sq & 0\\
0 & 0 & 0 & 1
\end{pmatrix}
$$
其中 sq, sc 分別是,
$
sc = sin(\alpha / 2) * cos(\alpha / 2)\\
sq = sin^2(\alpha / 2)
$
這個矩陣是針對某一個向量座標軸 $[x, y, z]$ 來旋轉一個 $\alpha$ 的角度。然後,結果不是我們想要的,旋轉超越極限值之後,就開始出現奇怪的變形透視。
後來不死心再去研究一下 DeviceMotionEvent 所輸出的數字,實際上發現,那三個數值確實是 $[x, y, z]$ 三軸變化沒有錯,但是,沒有告訴你的是,這三個角度改變的不只是角度,而是座標向量轉變所衍生出來的。詳細解釋可以看看這個,
一圖解千言,

By Lionel Brits (Hand drawn in Inkscape by me) [GFDL (http://www.gnu.org/copyleft/fdl.html) or CC BY 3.0 (http://creativecommons.org/licenses/by/3.0)], via Wikimedia Commons
所以,當作標系角度轉換了,我們要 旋轉 的東西,就不是單純的 $[\alpha, \beta, \gamma]$ 可以解決的事情了。
rotate3d
所以我把目標放到 rotate3d 上面。
研究過程中發現了這個,
http://www.w3.org/Talks/2012/0416-CSS-WWW2012/Demos/transforms/demo-rotate3d.html
Watch out! vertical Y axis in 3d is inverted.
這就是為什麼我們直接將 $[\alpha, \beta, \gamma]$ 拿來用會出現的問題。所以,依照 rotate3d 的設定,每次旋轉必須要重新定義座標軸的向量,再來旋轉相對應的角度,就能避開這些狀況。
對於 3D 座標軸的轉換,可以用 wiki 提供的公式來解,
$$
\begin{pmatrix}
cos\theta + v_x^2 * (1 - cos\theta) & v_x * v_y * (1 - cos\theta) - v_z * sin\theta & v_x * v_z * (1 - cos\theta) + v_y * sin\theta\\
v_y * v_x * (1 - cos\theta) + v_z * sin\theta & cos\theta + v_y^2 * (1 - cos\theta) & v_y * v_z * (1 - cos\theta) - v_x * sin\theta\\
v_z * v_x * (1 - cos\theta) - v_y * sin\theta & v_z * v_x * (1 - cos\theta) + v_x * sin\theta & cos\theta + v_z^2 * (1 - cos\theta)
\end{pmatrix}
$$
接著要操作座標軸轉換,根據 w3c 表示,三個數值的邊界值分別是:
- $\alpha = [0, 360]$
- $\beta = [-180, 180]$
- $\gamma = [-90, 90]$
再根據 Euler Angles 來做一次座標轉換,
By Euler2.gif: Juansempere derivative work: Xavax (This file was derived from Euler2.gif:) [CC BY-SA 3.0 (http://creativecommons.org/licenses/by-sa/3.0) or GFDL (http://www.gnu.org/copyleft/fdl.html)], via Wikimedia Commons
程式碼
// https://en.wikipedia.org/wiki/Rotation_matrix
// 向量座標軸轉換
function rotateMatrix(axis, angle) {
var sc = Math.cos(angle * Math.PI / 180.0),
sq = Math.sin(angle * Math.PI / 180.0),
x = axis[0],
y = axis[1],
z = axis[2];
var rm = [
[0,0,0],
[0,0,0],
[0,0,0],
];
rm[0][0] = sc + x*x * (1-sc);
rm[1][0] = z*sq + y*x * (1-sc);
rm[2][0] = -y*sq + z*x * (1-sc);
rm[0][1] = -z*sq + x*y * (1-sc);
rm[1][1] = sc + y*y * (1-sc);
rm[2][1] = x*sq + z*y * (1-sc);
rm[0][2] = y*sq + x*z * (1-sc);
rm[1][2] = -x*sq + y*z * (1-sc);
rm[2][2] = sc + z*z * (1-sc);
return [
rm[0][0] * vector[0] + rm[0][1] * vector[1] + rm[0][2] * vector[2],
rm[1][0] * vector[0] + rm[1][1] * vector[1] + rm[1][2] * vector[2],
rm[2][0] * vector[0] + rm[2][1] * vector[1] + rm[2][2] * vector[2]
];
}
// 預設座標軸向量
var default_vector = {
x: [1, 0, 0],
y: [0, 1, 0],
z: [0, 0, 1],
};
window.ondeviceorientation = function(event) {
var alpha = Math.floor(event.alpha),
beta = Math.floor(event.beta),
gamma = Math.floor(event.gamma) * -1;
// 轉換座標軸向量
var axis = { x:0, y: 0, z: 0 };
// 用上面那個 GIF 圖片的順序來做轉換
axis.y = default_vecotr.y;
axis.x = rotateMatrix(default_vector.x, axis.y, gamma);
axis.z = rotateMatrix(rotateMatrix(default_vector.z, axis.y, gamma), axis.x, beta);
// 最後使用 rotate3d 寫入 transform
// 要注意的是,三軸順序是 Z -> X -> Y
// 等於將上面那張 GIF 圖片順序倒過來放
document.getElementById('#box').style.transform = 'rotate3d(' + axis.z[0] + ', ' + axis.z[1] + ', ' + axis.z[2] + ', ' + alpha + 'deg) ' + 'rotate3d(' + axis.x[0] + ', ' + axis.x[1] + ', ' + axis.x[2] + ', ' + beta + 'deg) ' + 'rotate3d(' + axis.y[0] + ', ' + axis.y[1] + ', ' + axis.y[2] + ', ' + gamma + 'deg)';
};
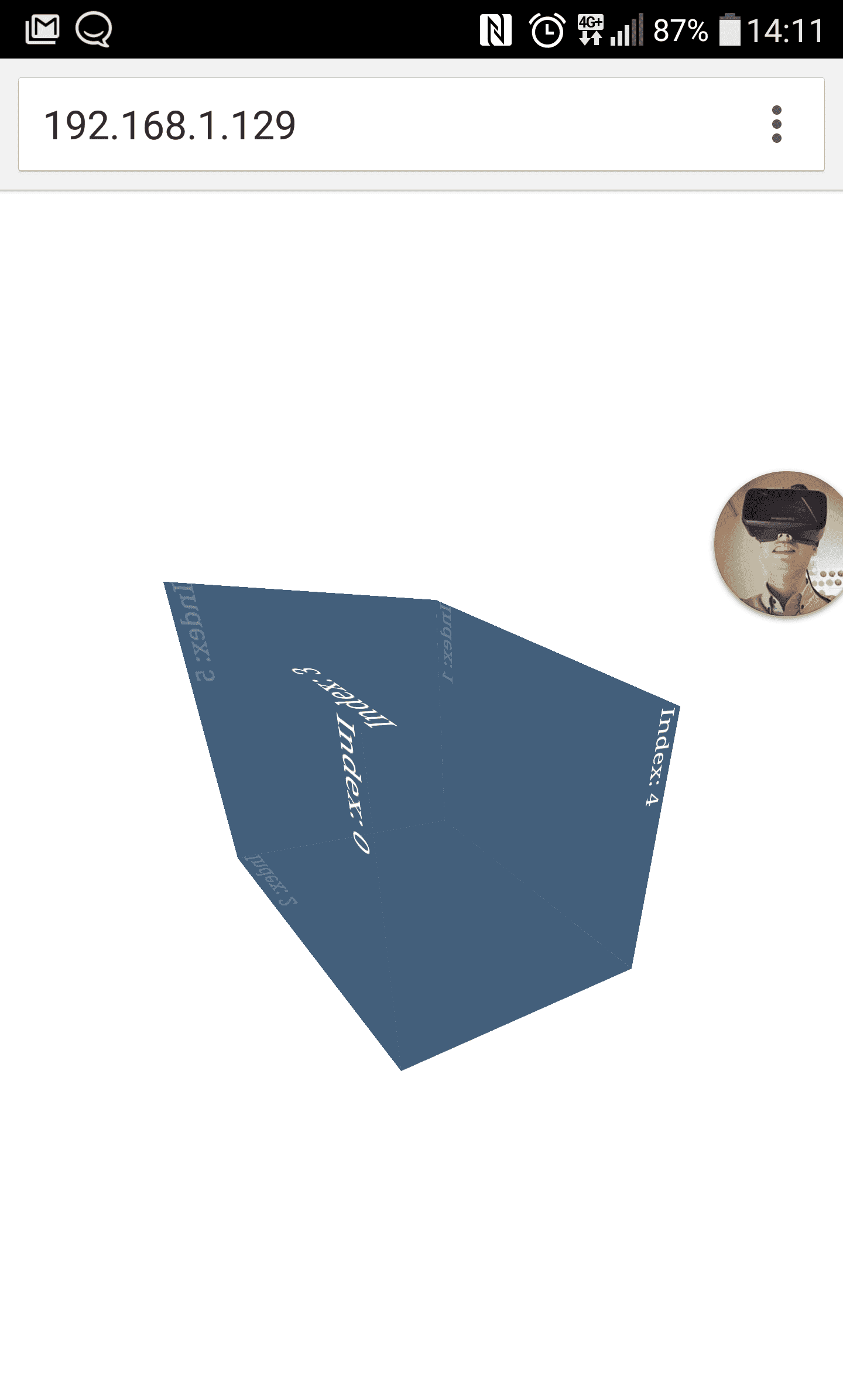
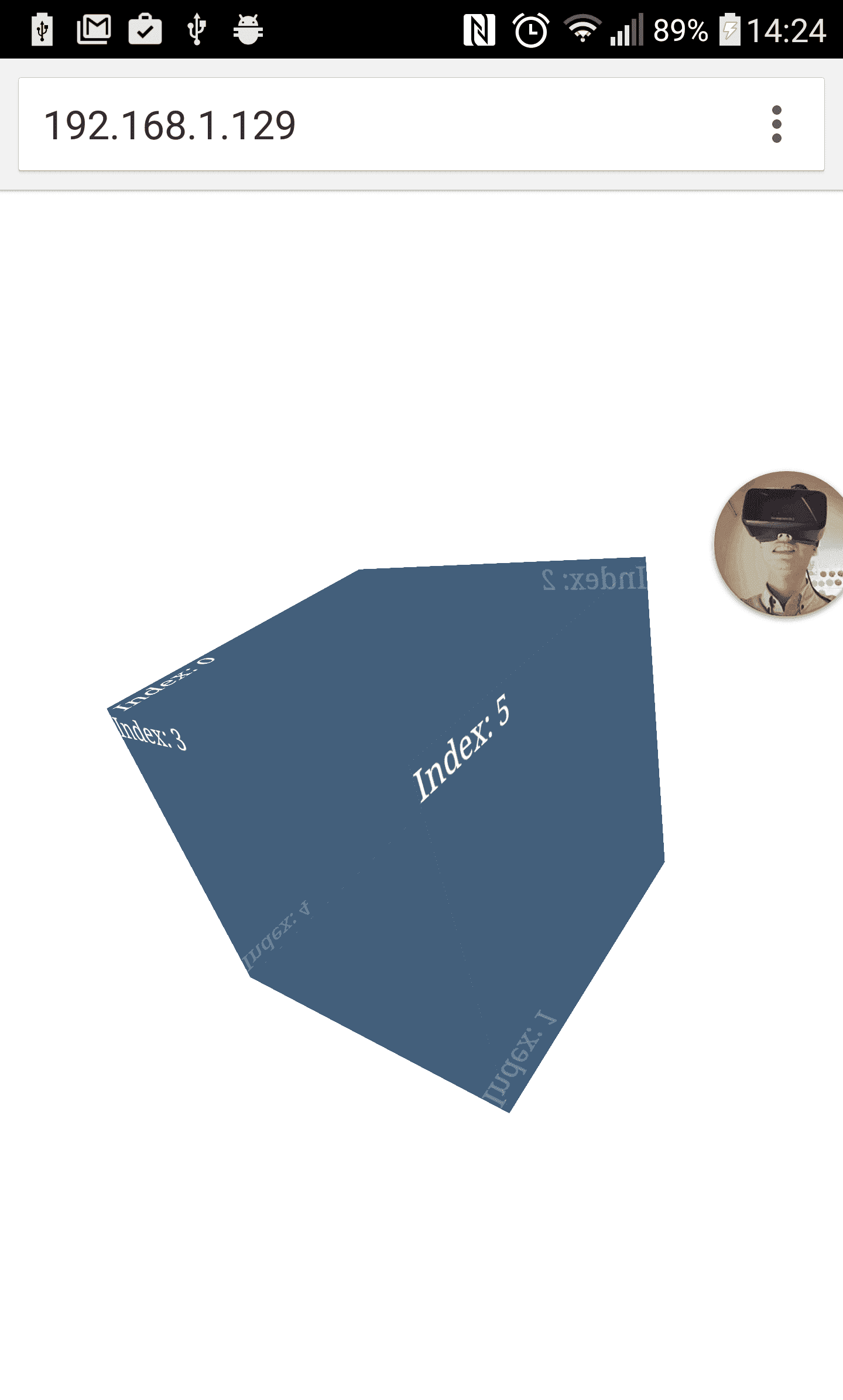
實際展示,請用手機開啟 http://jquery.hinablue.me/cube.html
跑起來好像頗正常,不過好像在不同裝置上會有意想不到的錯誤。你可以拿著手機旋轉、跳躍,我閉上眼。
就,再研究了。
後記
也許你會問,為什麼要從 Y 軸開始?好問題,因為我試過其他兩軸,無論你向量再怎麼正確,rotate3d 出來就是很詭異,整個方塊的動作跟手機的操作是違合的,具體是什麼原因我不太清楚。要搞清楚可能得去找數學系的吧(哈哈哈
感恩吳姓網友,雷射吳姓網友。
